
基于单片机的人体识别小车 - 深度学习 yolo目标检测 机器视觉 树莓派
liebian365 2025-01-31 13:54 16 浏览 0 评论
基于单片机的机器视觉人体识别小车
- 难度系数:4分
- 工作量:4分
- 创新点:3分
1 简介
智能小车应用变得越来越重要,它不仅是能够把代码与实践连接起来的简单实例,而且在即将到来的智能时代,也将是最先广泛使用的智能产品。
本项目基于AI视觉和嵌入式小车结合的项目。视觉识别是一个主要内容,是信息输入的重要方式。因此,AI视觉和机器小车的互相配合加持对实际生产生活具有很大的意义。
实现了控制小车行进,并实时检测人体目标。
2 主要器件
- 树莓派3B+
- 四个直流电机
- 一个小车底盘+四个车轮
- L298N驱动模块(介于树莓派与马达之间的桥梁)
- 充电宝一个(用于给树莓派供电)
- 18650锂电池两节
- 杜邦线
- 面包板
- .蜂鸣器
3 线路连接
图片是用fritzing这个软件画的,也是今天第一次用,画的有点丑,凑合看吧。我没有找到L298N这个模块,就用图中红色的这个代替一下吧。
我的马达控制逻辑比较简单,小车左右两侧的马达为一组同时控制,小车左边两个马达正负极分别连在out1、out2接口上,右边两个马达正负极分别连在out3、out4上,通过给out1和out2,out3和out4输出相反的电平实现马达的转动,采用BOARD编码格式,使用35、33、31、29四个GPIO接口分别连接到L298N驱动模块上的in1、in2、in3、in4接口,同时将32、36、38、40分别连接到四个使能端接口,通过python编程设置gpio接口输出高电平和低电平实现相应的控制,蜂鸣器连接到gpio的11号端口上。
4 Yolo环境搭建
根据自己NVIDIA显卡型号和驱动版本安装CUDA和CUDNN
1、官网下载:https://developer.nvidia.com/cuda-90-download-archive
如下:
2、安装依赖库
sudo apt-get install freeglut3-dev build-essential libx11-dev libxmu-dev libxi-dev libgl1-mesa-glx libglu1-mesa libglu1-mesa-dev否则将会报错:
3、注意C++\G++版本
CUDA9.0要求GCC版本是5.x或者6.x,其他版本不可以,需要自己进行配置,通过以下命令才对gcc版本进行修改。
查看版本:
g++ --version版本安装:
sudo apt-get install gcc-5
sudo apt-get install g++-5通过命令替换掉之前的版本:
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-5 50
sudo update-alternatives --install /usr/bin/g++ g++ /usr/bin/g++-5 50最后记得再次查看版本是否修改成功。
4、运行run文件
sudo sh cuda_9.0.176_384.81_linux.run安装协议可以直接按q跳到最末尾,注意一项:
Install NVIDIA Accelerated Graphics Driver for Linux-x86_64 384.81?
(y)es/(n)o/(q)uit: n # 安装NVIDIA加速图形驱动程序,这里选择n5、添加环境变量
进行环境的配置,打开环境变量配置文件
sudo gedit ~/.bashrc在末尾把以下配置写入并保存:
#CUDA
export PATH=/usr/local/cuda-9.0/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-9.0/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}最后执行:
source ~/.bashrc5 yolo模型训练
本文训练数据集包括从VOC数据集中提取出6095张人体图片,以及使用LabelImg工具标注的200张python爬虫程序获取的人体图片作为补充。
使用labelimg标记图片
从VOC数据集里提取出人体图片
import os
import os.path
import shutil
fileDir_ann = "D:\\VOC\\VOCdevkit\\VOC2012\\Annotations"
fileDir_img = "D:\\VOC\\VOCdevkit\\VOC2012\\JPEGImages\\"
saveDir_img = "D:\\VOC\\VOCdevkit\\VOC2012\\JPEGImages_ssd\\"
if not os.path.exists(saveDir_img):
os.mkdir(saveDir_img)
names = locals()
for files in os.walk(fileDir_ann):
for file in files[2]:
saveDir_ann = "D:\\VOC\\VOCdevkit\\VOC2012\\Annotations_ssd\\"
if not os.path.exists(saveDir_ann):
os.mkdir(saveDir_ann)
fp = open(fileDir_ann + '\\' + file)
saveDir_ann = saveDir_ann + file
fp_w = open(saveDir_ann, 'w')
classes = ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', '>cat<', 'chair', 'cow',
'diningtable', \
'dog', 'horse', 'motorbike', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor', 'person']
lines = fp.readlines()
ind_start = []
ind_end = []
lines_id_start = lines[:]
lines_id_end = lines[:]
while "\t<object>\n" in lines_id_start:
a = lines_id_start.index("\t<object>\n")
ind_start.append(a)
lines_id_start[a] = "delete"
while "\t</object>\n" in lines_id_end:
b = lines_id_end.index("\t</object>\n")
ind_end.append(b)
lines_id_end[b] = "delete"
i = 0
for k in range(0, len(ind_start)):
for j in range(0, len(classes)):
if classes[j] in lines[ind_start[i] + 1]:
a = ind_start[i]
names['block%d' % k] = [lines[a], lines[a + 1], \
lines[a + 2], lines[a + 3], lines[a + 4], \
lines[a + 5], lines[a + 6], lines[a + 7], \
lines[a + 8], lines[a + 9], lines[a + 10], \
lines[ind_end[i]]]
break
i += 1
classes1 = '\t\t<name>person</name>\n'
string_start = lines[0:ind_start[0]]
string_end = [lines[len(lines) - 1]]
a = 0
for k in range(0, len(ind_start)):
if classes1 in names['block%d' % k]:
a += 1
string_start += names['block%d' % k]
string_start += string_end
for c in range(0, len(string_start)):
fp_w.write(string_start[c])
fp_w.close()
if a == 0:
os.remove(saveDir_ann)
else:
name_img = fileDir_img + os.path.splitext(file)[0] + ".jpg"
shutil.copy(name_img, saveDir_img)
fp.close()
修改YOLOv3 tiny 配置文件
下载预训练权重开始训练
预训练权重可以减少前期的迭代次数,加速训练过程。通过绘制训练过程的loss曲线可知,开始时loss下降较快,之后开始在一水平线上波动。训练结束得到yolov3-voc_final.weights模型文件。
模型效果:
6 模型转化
但是模型要想部署在算力微弱的树莓派上,还需要进行两次模型转化才能运行在NCS上进行前向推理。
模型转化:
第一次转化:(.weight–>.pb)
这里的模型转化OpenVINO给出了官方指南https://docs.openvinotoolkit.org/latest/_docs_MO_DG_prepare_model_convert_model_tf_specific_Convert_YOLO_From_Tensorflow.html 但是可能会出现错误。
python3 convert_weights_pb.py \
--class_names yolov3-tiny-mine.names \
--weights_file weights/yolov3-tiny-mine_40000.weights \
--data_format NHWC \
--tiny \
--output_graph pbmodels/frozen_yolov3-tiny-mine.pb执行完上述代码,就能得到Tensorflow支持的模型文件。
第二次转化:(.pb–>.IR)
第二次的模型转化我在windows环境下完成的。
python "C:\Program Files (x86)\IntelSWTools\openvino_2019.1.087\deployment_tools\model_optimize7 树莓派环境配置
1. 下载烧写工具Pi Imager
打开树莓派官方网站https://www.raspberrypi.org/software/,根据下图指示下载Pi Imager并安装
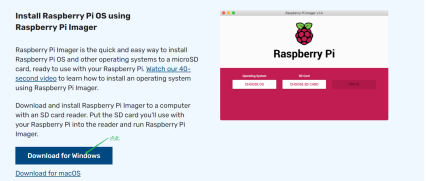2.在线烧写
① 将配套SD卡放入读卡器插入到电脑的USB口;
② 打开烧录软件Pi Imager,在“operating system”选择“Raspberry Pi OS(32-bit)”(第一项);
③ 在"SD Card"选择SD卡,然后点击“write”,然后等待烧写完成。
3. 离线烧写
① 下载raspberry系统镜像
打开树莓派官方网站https://www.raspberrypi.org/software/,点击按钮“See all download options”
② 在“Raspberry Pi OS with desktop and recommended
software”项点击“Download”,等待下载完成。
③ 烧录系统:
在Pi Imager中“Operating System”选择最后一项“use Custom”,在弹出对话框中选择刚刚下载的镜像。后续步骤同在线烧录。
4. 启动树莓派,验证系统
① 将SD卡插到树莓派SD卡插槽,如下图;
② 打开供电开关,给系统供电,指示灯点亮并闪烁,电压表实时显示电池电压(当电压低于6.8V以下,应及时给小车供电);
③ 二十多秒后,系统启动完成。正常启动完成后,红灯亮,绿灯闪烁。
模型部署:
使用github PINTO0309的OpenVINO-YoloV3工程,应该是个日本的工程师写的,特别感谢。
利用工程下的openvino_tiny-yolov3_MultiStick_test.py进行测试,在文件中指定我们转化好的模型文件。
运行效果
image
尽管速度不快,但最快也能达到7-8帧的样子。
本文将训练好的原始模型经过两次转化得到了可以被NCS所支持的模型文件,并搭建好树莓派所需的运行环境,最终将模型部署在树莓派上并完成了测试。下篇文章将介绍,树莓派小车的控制程序以及微信报警程序的实现。
8 最后
嵌入式物联网的学习之路非常漫长,不少人因为学习路线不对或者学习内容不够专业而错失高薪offer。不过别担心,我为大家整理了一份150多G的学习资源,基本上涵盖了嵌入式物联网学习的所有内容。点击下方链接,0元领取学习资源,让你的学习之路更加顺畅!记得点赞、关注、收藏、转发哦!
点击这里找小助理0元领取:扫码进群领资料
相关推荐
- 4万多吨豪华游轮遇险 竟是因为这个原因……
-
(观察者网讯)4.7万吨豪华游轮搁浅,竟是因为油量太低?据观察者网此前报道,挪威游轮“维京天空”号上周六(23日)在挪威近海发生引擎故障搁浅。船上载有1300多人,其中28人受伤住院。经过数天的调...
- “菜鸟黑客”必用兵器之“渗透测试篇二”
-
"菜鸟黑客"必用兵器之"渗透测试篇二"上篇文章主要针对伙伴们对"渗透测试"应该如何学习?"渗透测试"的基本流程?本篇文章继续上次的分享,接着介绍一下黑客们常用的渗透测试工具有哪些?以及用实验环境让大家...
- 科幻春晚丨《震动羽翼说“Hello”》两万年星间飞行,探测器对地球的最终告白
-
作者|藤井太洋译者|祝力新【编者按】2021年科幻春晚的最后一篇小说,来自大家喜爱的日本科幻作家藤井太洋。小说将视角放在一颗太空探测器上,延续了他一贯的浪漫风格。...
- 麦子陪你做作业(二):KEGG通路数据库的正确打开姿势
-
作者:麦子KEGG是通路数据库中最庞大的,涵盖基因组网络信息,主要注释基因的功能和调控关系。当我们选到了合适的候选分子,单变量研究也已做完,接着研究机制的时便可使用到它。你需要了解你的分子目前已有哪些...
- 知存科技王绍迪:突破存储墙瓶颈,详解存算一体架构优势
-
智东西(公众号:zhidxcom)编辑|韦世玮智东西6月5日消息,近日,在落幕不久的GTIC2021嵌入式AI创新峰会上,知存科技CEO王绍迪博士以《存算一体AI芯片:AIoT设备的算力新选择》...
- 每日新闻播报(September 14)_每日新闻播报英文
-
AnOscarstatuestandscoveredwithplasticduringpreparationsleadinguptothe87thAcademyAward...
- 香港新巴城巴开放实时到站数据 供科技界研发使用
-
中新网3月22日电据香港《明报》报道,香港特区政府致力推动智慧城市,鼓励公私营机构开放数据,以便科技界研发使用。香港运输署21日与新巴及城巴(两巴)公司签署谅解备忘录,两巴将于2019年第3季度,开...
- 5款不容错过的APP: Red Bull Alert,Flipagram,WifiMapper
-
本周有不少非常出色的app推出,鸵鸟电台做了一个小合集。亮相本周榜单的有WifiMapper's安卓版的app,其中包含了RedBull的一款新型闹钟,还有一款可爱的怪物主题益智游戏。一起来看看我...
- Qt动画效果展示_qt显示图片
-
今天在这篇博文中,主要实践Qt动画,做一个实例来讲解Qt动画使用,其界面如下图所示(由于没有录制为gif动画图片,所以请各位下载查看效果):该程序使用应用程序单窗口,主窗口继承于QMainWindow...
- 如何从0到1设计实现一门自己的脚本语言
-
作者:dong...
- 三年级语文上册 仿写句子 需要的直接下载打印吧
-
描写秋天的好句好段1.秋天来了,山野变成了美丽的图画。苹果露出红红的脸庞,梨树挂起金黄的灯笼,高粱举起了燃烧的火把。大雁在天空一会儿写“人”字,一会儿写“一”字。2.花园里,菊花争奇斗艳,红的似火,粉...
- C++|那些一看就很简洁、优雅、经典的小代码段
-
目录0等概率随机洗牌:1大小写转换2字符串复制...
- 二年级上册语文必考句子仿写,家长打印,孩子照着练
-
二年级上册语文必考句子仿写,家长打印,孩子照着练。具体如下:...
欢迎 你 发表评论:
- 一周热门
- 最近发表
- 标签列表
-
- wireshark怎么抓包 (75)
- qt sleep (64)
- cs1.6指令代码大全 (55)
- factory-method (60)
- sqlite3_bind_blob (52)
- hibernate update (63)
- c++ base64 (70)
- nc 命令 (52)
- wm_close (51)
- epollin (51)
- sqlca.sqlcode (57)
- lua ipairs (60)
- tv_usec (64)
- 命令行进入文件夹 (53)
- postgresql array (57)
- statfs函数 (57)
- .project文件 (54)
- lua require (56)
- for_each (67)
- c#工厂模式 (57)
- wxsqlite3 (66)
- dmesg -c (58)
- fopen参数 (53)
- tar -zxvf -c (55)
- 速递查询 (52)